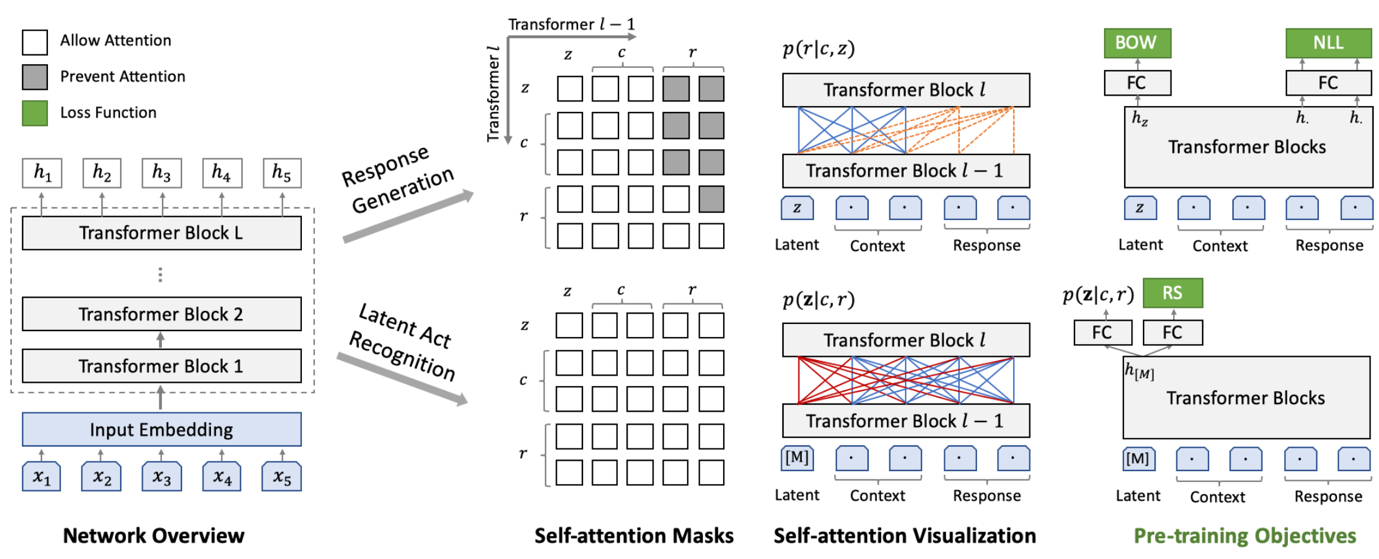
(莫慌,这图是拿出来撑场面的,我可能和你一样看不懂)
前言:这是一篇很不严肃的实验文章。每一个会修电脑的人,都可以很容易地照着本文的描述,自己去操作一遍。
大概一周前,百度不是发布了一个“取得重要进展”的对话生成网络 PLATO-2 吗?我当时一看到那消息,精神就来了,为什么?这得先从解释一下“这玩意是干什么用的”说起——毕竟,这篇文章要让每一个群众都能看得懂,大家好才是真的好。
近日,百度发布对话生成网络 PLATO-2,宣布在开放域对话生成模型上迎来重要进展。PLATO-2 承袭 PLATO 隐变量进行回复多样化生成特性,模型参数高达 16 亿,涵盖中英文版本,可就开放域话题深度畅聊。实验结果显示,PLATO-2 中英文对话效果已超越谷歌 Meena、微软小冰和 Facebook Blender 等先进模型。
咳咳,这些专业术语说的是什么鬼?
如果你完全看不明白这段话,只需要知道:它说的是和NLP(自然语言处理,一门机器学习的分支学科)相关的一些东西。
可能有的人只听说过这段话里提到的“微软小冰”——她的主要功能就是一个【聊天机器人】,和小米的“小爱同学”颇为相似。
“小爱同学,帮我把空调打开!” “好的,开啦!”
——相信这样的场景,早已飞入我国千千万万寻常百姓家。
所以,百度发布的这个 PLATO-2,它可以用来做“小爱同学”的大脑,也就是最核心的那一块功能。不过现实中的“小爱同学”远比这个复杂,在这里只是做一个比喻而已。
阅读更多
