当今世界,深度学习应用已经渗透到了我们生活的方方面面,深度学习技术背后的核心问题是最优化(Optimization)。最优化是应用数学的一个分支,它是研究在给定约束之下如何寻求某些因素(的量),以使某一(或某些)指标达到最优的一些学科的总称。
梯度下降法(Gradient descent,又称最速下降法/Steepest descent),是无约束最优化领域中历史最悠久、最简单的算法,单独就这种算法来看,属于早就“过时”了的一种算法。但是,它的理念是其他某些算法的组成部分,或者说在其他某些算法中,也有梯度下降法的“影子”。例如,各种深度学习库都会使用SGD(Stochastic Gradient Descent,随机梯度下降)或变种作为其优化算法。
今天我们就再来回顾一下梯度下降法的基础知识。
『1』名字释义
在很多机器学习算法中,我们通常会通过多轮的迭代计算,最小化一个损失函数(loss function)的值,这个损失函数,对应到最优化里就是所谓的“目标函数”。
在寻找最优解的过程中,梯度下降法只使用目标函数的一阶导数信息——从“梯度”这个名字也可见一斑。并且它的本意是取目标函数值“最快下降”的方向作为搜索方向,这也是“最速下降”这个名字的来源。
于是自然而然地,我们就想知道一个问题的答案:沿什么方向,目标函数  的值下降最快呢?
的值下降最快呢?
『2』函数值下降最快的方向是什么
先说结论:沿负梯度方向  ,函数值下降最快。此处,我们用
,函数值下降最快。此处,我们用  表示方向(direction),用
表示方向(direction),用  表示梯度(gradient)。
表示梯度(gradient)。
下面就来推导一下。
将目标函数 在点  处泰勒展开(在最优化领域,这是一个常用的手段):
处泰勒展开(在最优化领域,这是一个常用的手段):

高阶无穷小  可忽略,由于我们定义了步长
可忽略,由于我们定义了步长  (在ML领域,步长就是平常所说的learning rate),因此,当
(在ML领域,步长就是平常所说的learning rate),因此,当  时,
时,  ,即函数值是下降的。此时
,即函数值是下降的。此时  就是一个下降方向。
就是一个下降方向。
但是 具体等于什么的时候,可使目标函数值下降最快呢?
文章来源:http://www.codelast.com/
数学上,有一个非常著名的不等式:Cauchy-Schwartz不等式(柯西-许瓦兹不等式)1,它是一个在很多场合都用得上的不等式:


由Cauchy-Schwartz不等式可知:

当且仅当  时,等号成立,
时,等号成立,  最大(>0)。
最大(>0)。
所以  时, 最小(<0), 下降量最大。
时, 最小(<0), 下降量最大。
所以  是最快速下降方向。
是最快速下降方向。
『3』缺点
它真的如它的名字所描述的,是“最快速”的吗?从很多经典的最优化书籍你会了解到:并不是。
事实上,它只在局部范围内具有“最速”性质;对整体求最优解的过程而言,它让目标函数值下降非常缓慢。
『4』感受一下它是如何“慢”的
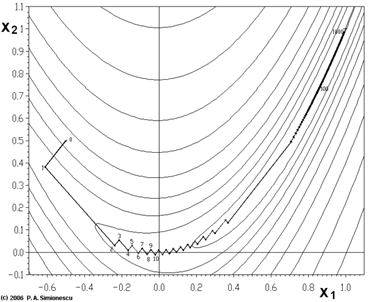
先来看一幅图2:
文章来源:http://www.codelast.com/
这幅图表示的是对一个目标函数寻找最优解的过程,图中锯齿状的路线就是寻优路线在二维平面上的投影。从这幅图我们可以看到,锯齿一开始比较大(跨越的距离比较大),后来越来越小;这就像一个人走路迈的步子,一开始大,后来步子越迈越小。
这个函数的表达式是这样的:

它叫做Rosenbrock function3(罗森布罗克函数),是个非凸函数,在最优化领域,它可以用作一个最优化算法的performance test函数。这个函数还有一个更好记也更滑稽的名字:banana function(香蕉函数)。
我们来看一看它在三维空间中的图形:
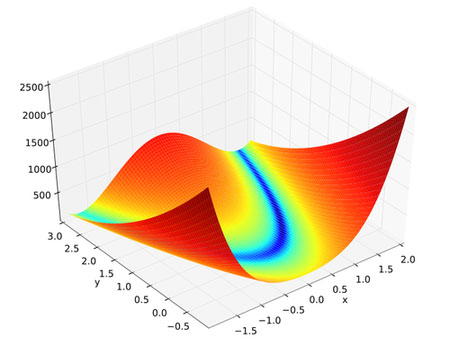

它在三维空间中的图形是这样的:
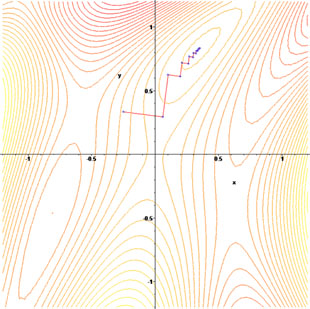
『5』为什么“慢”
从上面花花绿绿的图,我们看到了寻找最优解的过程有多么“艰辛”,但不能光看热闹,还要分析一下原因。
在最优化算法中,精确的line search满足一个一阶必要条件,即:梯度与方向的点积为零(当前点在
方向上移动到的那一点(  )处的梯度,与当前点的搜索方向 的点积为零)。
)处的梯度,与当前点的搜索方向 的点积为零)。由此得知:
 ,即
,即 
故由梯度下降法的
得:

即:相邻两次的搜索方向是相互直交的(投影到二维平面上,就是锯齿形状了)。
文章来源:http://www.codelast.com/
如果你非要问,为什么
就表明这两个向量是相互直交的?那是因为,由两向量夹角的公式:
=>

可知两向量夹角为90度,因此它们直交。
『6』优点
这个被我们说得一无是处的方法真的就那么糟糕吗?其实它还是有优点的:程序简单,计算量小;并且对初始点没有特别的要求;此外,许多算法的初始/再开始方向都是最速下降方向(即负梯度方向)。
文章来源:http://www.codelast.com/
『7』收敛性及收敛速度
梯度下降法具有整体收敛性——对初始点没有特殊要求。
采用精确的line search的梯度下降法的收敛速度:线性。
- 引用
(2)https://en.wikipedia.org/wiki/Gradient_descent
(3)https://en.wikipedia.org/wiki/Rosenbrock_function
(4)https://en.wikipedia.org/wiki/Gradient_descent
文章来源:https://www.codelast.com/
➤➤ 版权声明 ➤➤
转载需注明出处:codelast.com
感谢关注我的微信公众号(微信扫一扫):

”在最优化算法中,精确的line search满足一个一阶必要条件“这里的措辞不对,您估计将梯度和切向量混淆了,在GD中任何情况下,搜索方向d总是与反梯度一致,因此d总是与梯度处的切线垂直。
请问博主画rosenbrock函数的图像时如何反转x,y坐标轴的方向呀,我用python画出来x,y轴方向和你是反的,可以我觉得你这样更易于观看
抱歉,这图我是从网上找来的,不是我用Python画的
请问博主画rosenbrock函数的图像时如何反转x,y坐标轴的方向呀,我用python画出来x,y轴方向和你是反的,可以我觉得你这样更易于观看
你好大神,这两天公式都挂了,如果方便的话请您检查下
感谢提醒
选修了optimization的课程,由于本来这方面的知识就比较晦涩加之英文难以理解。基本将博主的几片最优化的文章看了一遍,语言通俗,让我理解了许多上课看书无法理解的东西
博主写的很好,很清晰。
谢谢楼主,写得很详细,帮助了我这种初学者。